Maskable PPO
Implementation of invalid action masking for the Proximal Policy Optimization (PPO) algorithm. Other than adding support for action masking, the behavior is the same as in SB3’s core PPO algorithm.
Available Policies
alias of |
|
alias of |
|
alias of |
Notes
Blog post: https://costa.sh/blog-a-closer-look-at-invalid-action-masking-in-policy-gradient-algorithms.html
Additional Blog post: https://boring-guy.sh/posts/masking-rl/
Can I use?
Recurrent policies: ❌
Multi processing: ✔️
Gym spaces:
Space |
Action |
Observation |
|---|---|---|
Discrete |
✔️ |
✔️ |
Box |
❌ |
✔️ |
MultiDiscrete |
✔️ |
✔️ |
MultiBinary |
✔️ |
✔️ |
Dict |
❌ |
✔️ |
Warning
You must use MaskableEvalCallback from sb3_contrib.common.maskable.callbacks instead of the base EvalCallback to properly evaluate a model with action masks.
Similarly, you must use evaluate_policy from sb3_contrib.common.maskable.evaluation instead of the SB3 one.
Warning
In order to use SubprocVecEnv with MaskablePPO, you must implement the action_masks inside the environment (ActionMasker cannot be used).
You can have a look at the built-in environments with invalid action masks to have a working example.
Example
Train a PPO agent on InvalidActionEnvDiscrete. InvalidActionEnvDiscrete has a action_masks method that
returns the invalid action mask (True if the action is valid, False otherwise).
from sb3_contrib import MaskablePPO
from sb3_contrib.common.envs import InvalidActionEnvDiscrete
from sb3_contrib.common.maskable.evaluation import evaluate_policy
from sb3_contrib.common.maskable.utils import get_action_masks
# This is a drop-in replacement for EvalCallback
from sb3_contrib.common.maskable.callbacks import MaskableEvalCallback
env = InvalidActionEnvDiscrete(dim=80, n_invalid_actions=60)
model = MaskablePPO("MlpPolicy", env, gamma=0.4, seed=32, verbose=1)
model.learn(5_000)
evaluate_policy(model, env, n_eval_episodes=20, reward_threshold=90, warn=False)
model.save("ppo_mask")
del model # remove to demonstrate saving and loading
model = MaskablePPO.load("ppo_mask")
obs, _ = env.reset()
while True:
# Retrieve current action mask
action_masks = get_action_masks(env)
action, _states = model.predict(obs, action_masks=action_masks)
obs, reward, terminated, truncated, info = env.step(action)
If the environment implements the invalid action mask but using a different name, you can use the ActionMasker
to specify the name (see PR #25):
Note
If you are using a custom environment and you want to debug it with check_env,
it will execute the method step passing a random action to it (using action_space.sample()),
without taking into account the invalid actions mask (see issue #145).
import gymnasium as gym
import numpy as np
from sb3_contrib.common.maskable.policies import MaskableActorCriticPolicy
from sb3_contrib.common.wrappers import ActionMasker
from sb3_contrib.ppo_mask import MaskablePPO
def mask_fn(env: gym.Env) -> np.ndarray:
# Do whatever you'd like in this function to return the action mask
# for the current env. In this example, we assume the env has a
# helpful method we can rely on.
return env.valid_action_mask()
env = ... # Initialize env
env = ActionMasker(env, mask_fn) # Wrap to enable masking
# MaskablePPO behaves the same as SB3's PPO unless the env is wrapped
# with ActionMasker. If the wrapper is detected, the masks are automatically
# retrieved and used when learning. Note that MaskablePPO does not accept
# a new action_mask_fn kwarg, as it did in an earlier draft.
model = MaskablePPO(MaskableActorCriticPolicy, env, verbose=1)
model.learn()
# Note that use of masks is manual and optional outside of learning,
# so masking can be "removed" at testing time
model.predict(observation, action_masks=valid_action_array)
Results
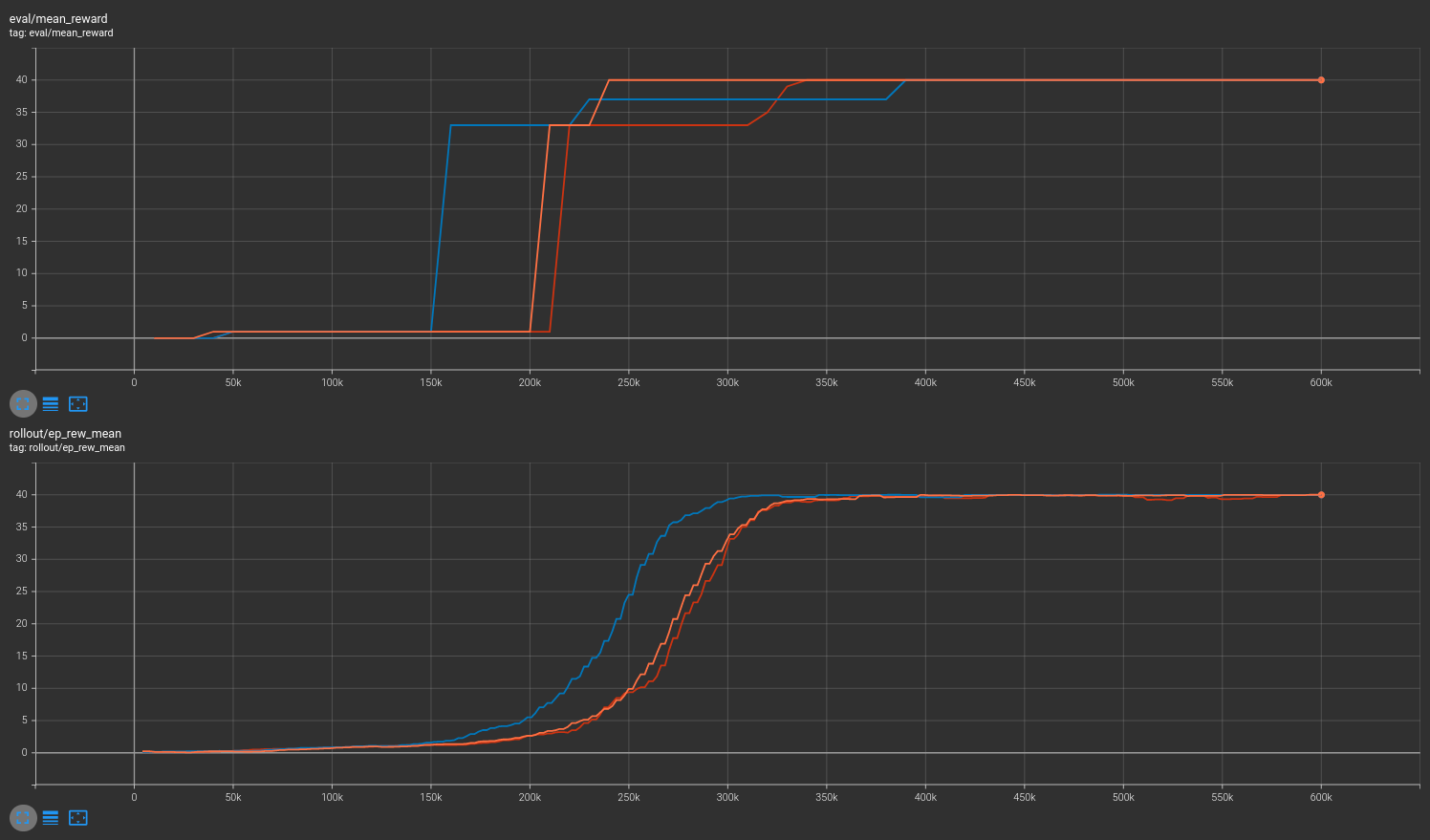
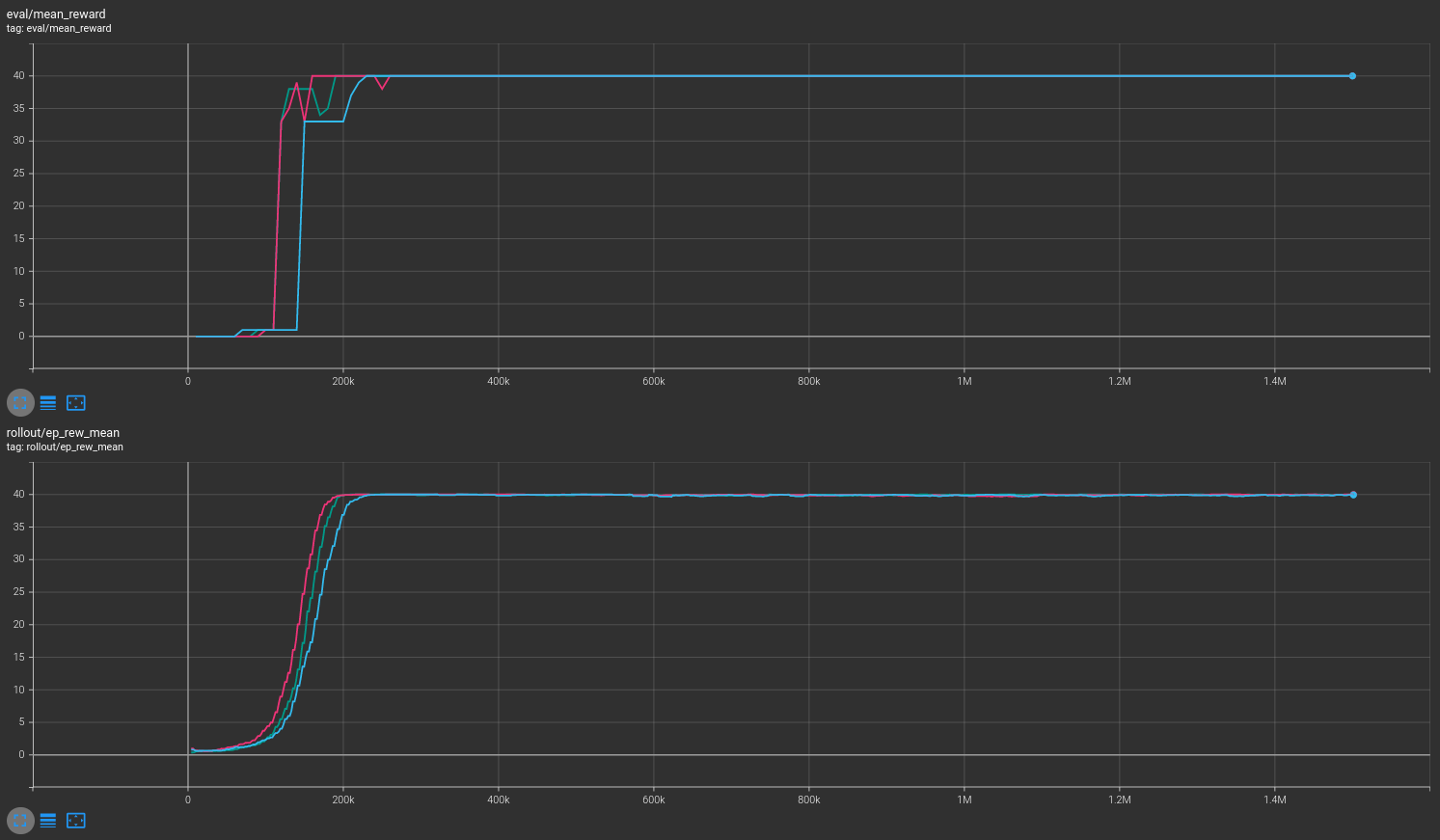
Results are shown for two MicroRTS benchmarks: MicrortsMining4x4F9-v0 (600K steps) and MicrortsMining10x10F9-v0 (1.5M steps). For each, models were trained with and without masking, using 3 seeds.
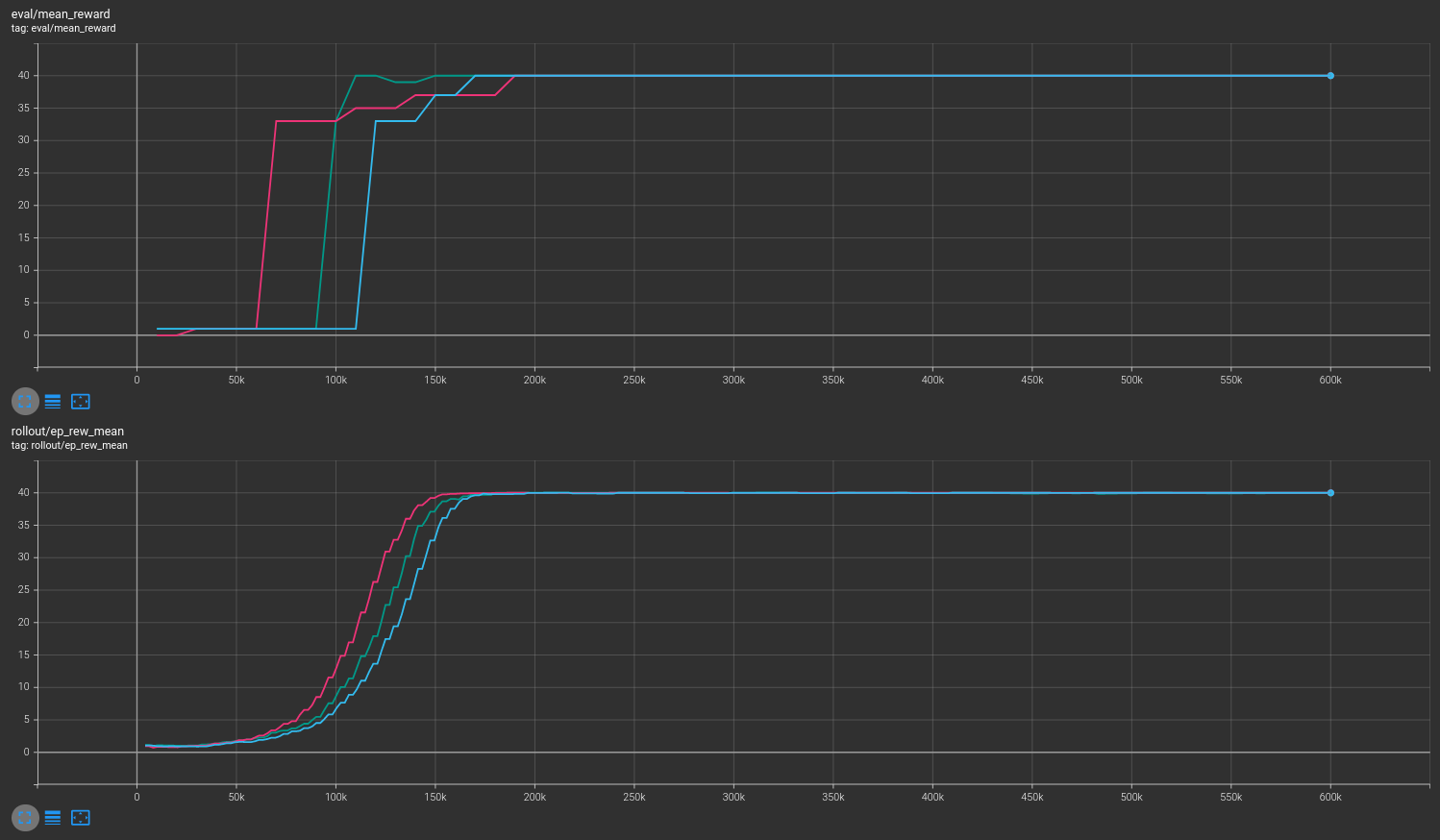
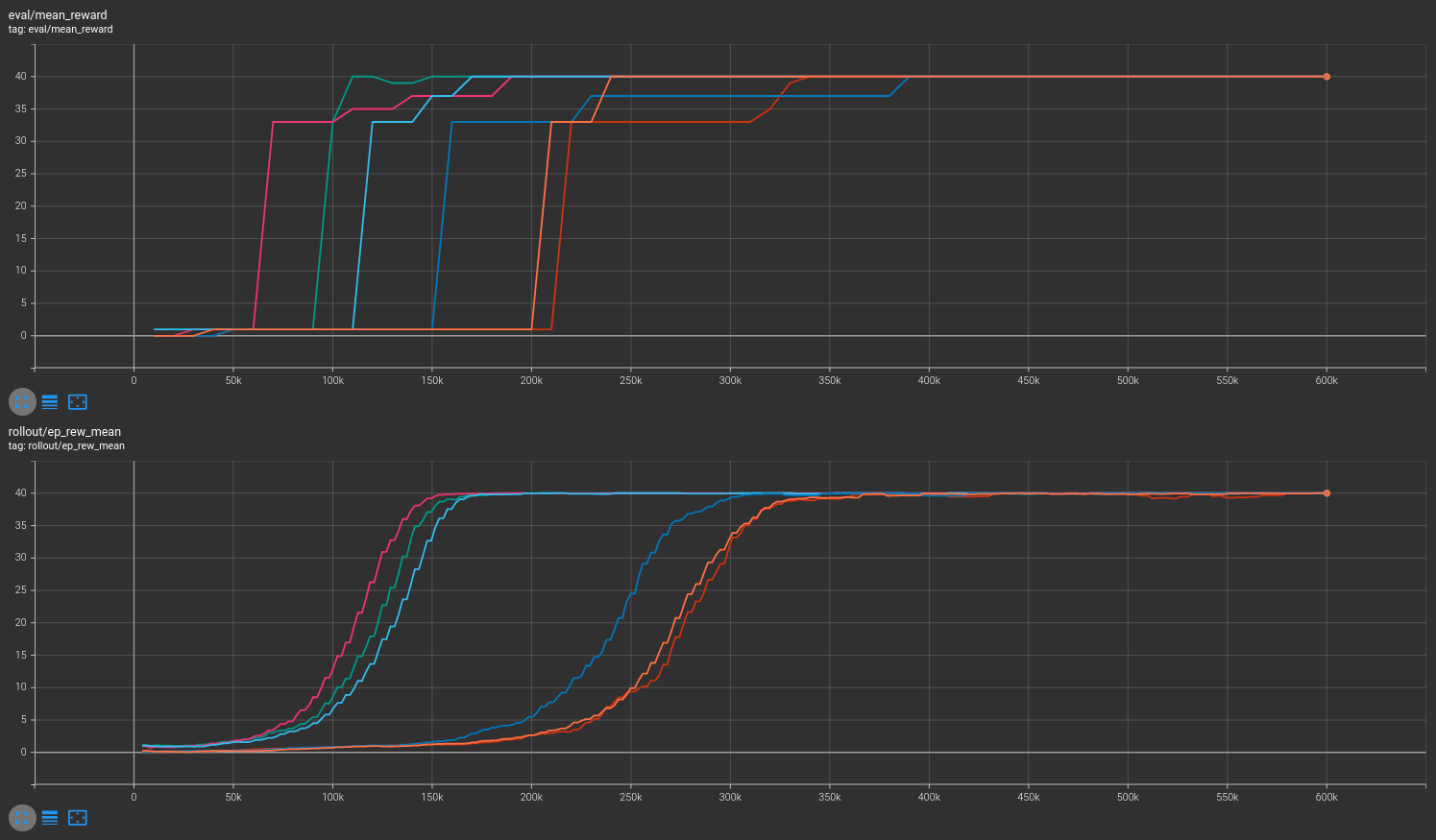
4x4
No masking
With masking
Combined
10x10
No masking
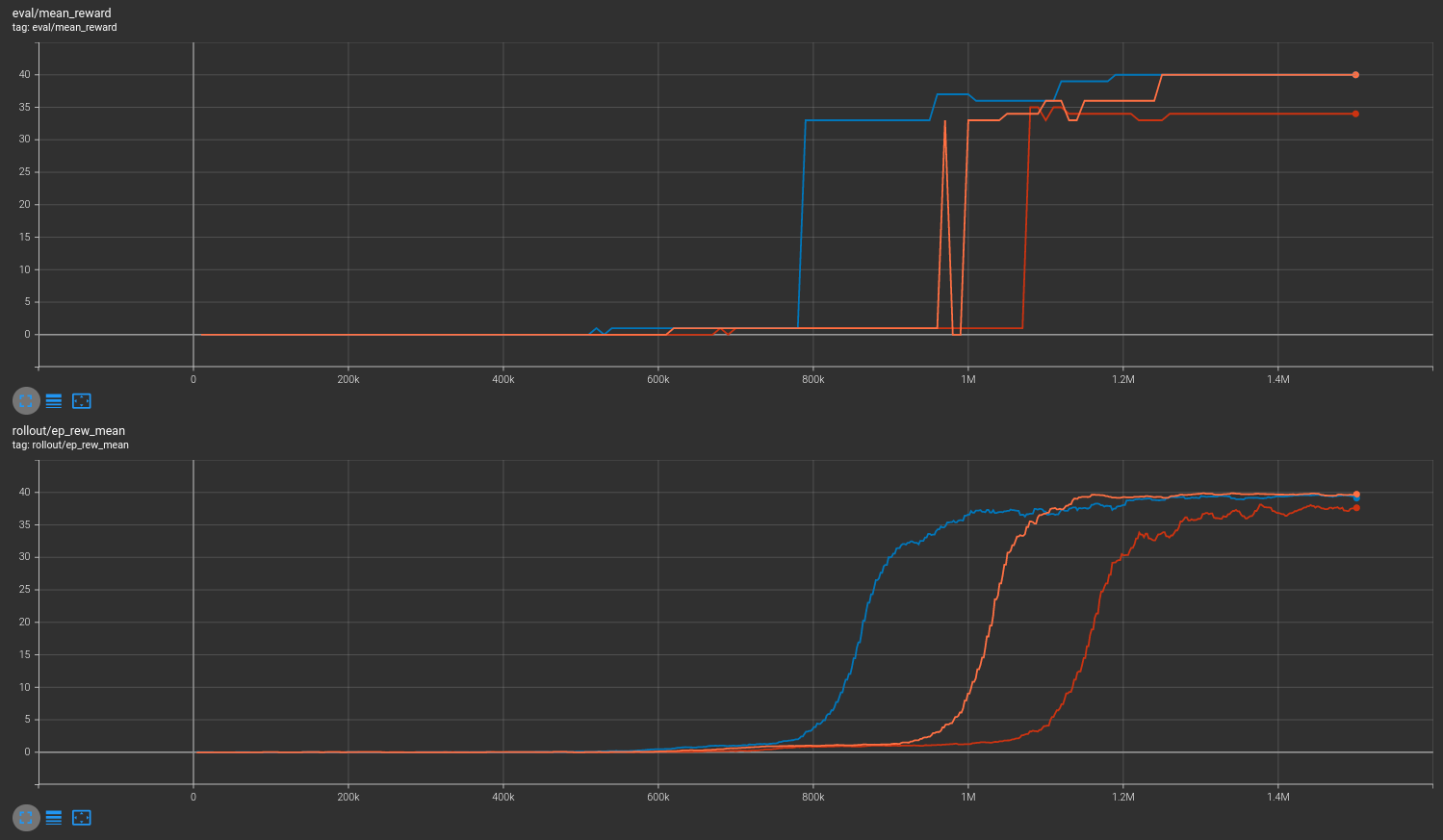
With masking
Combined
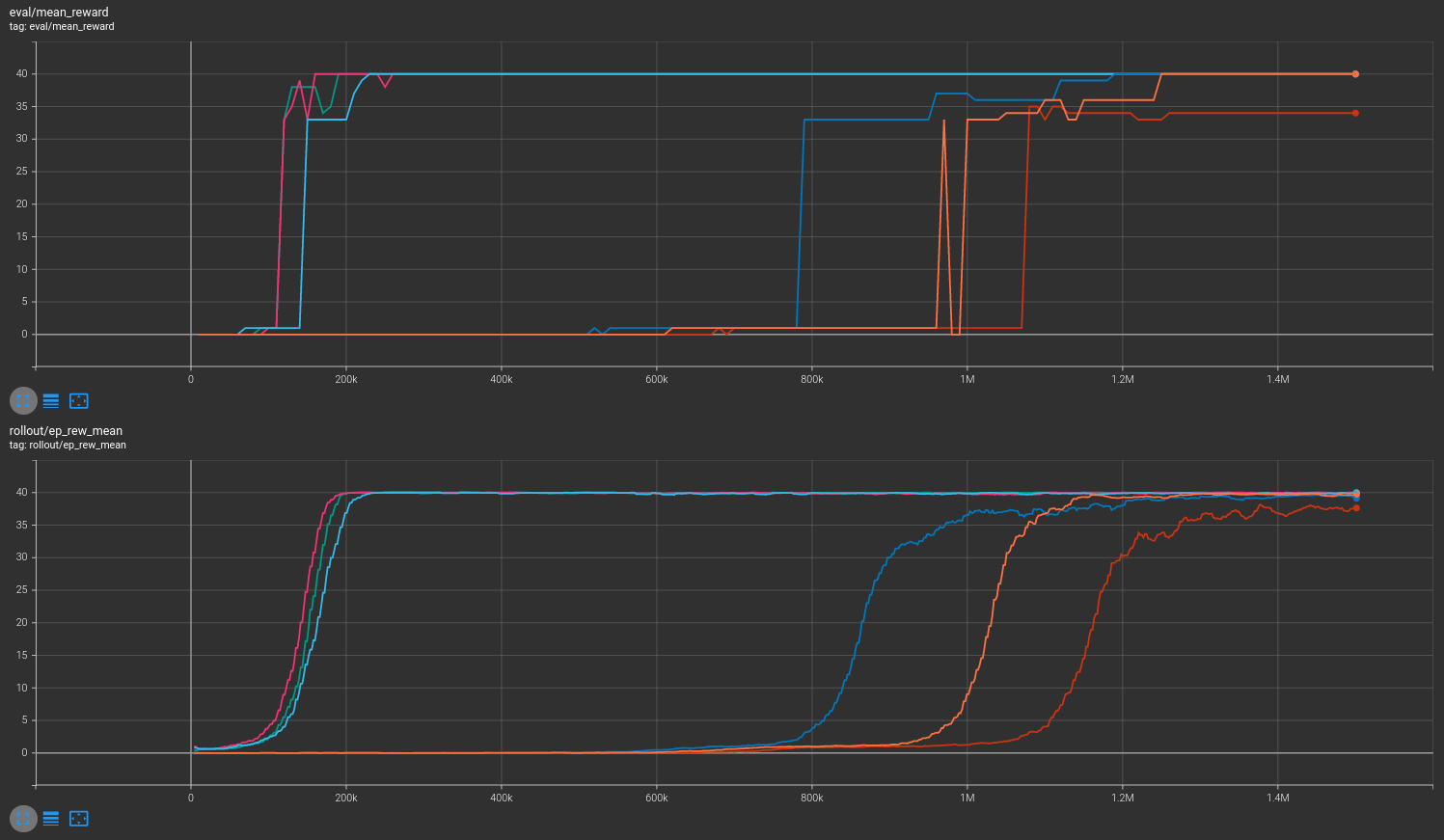
More information may be found in the associated PR.
How to replicate the results?
Clone the repo for the experiment:
git clone git@github.com:kronion/microrts-ppo-comparison.git
cd microrts-ppo-comparison
Install dependencies:
# Install MicroRTS:
rm -fR ~/microrts && mkdir ~/microrts && \
wget -O ~/microrts/microrts.zip http://microrts.s3.amazonaws.com/microrts/artifacts/202004222224.microrts.zip && \
unzip ~/microrts/microrts.zip -d ~/microrts/
# You may want to make a venv before installing packages
pip install -r requirements.txt
Train several times with various seeds, with and without masking:
# python sb/train_ppo.py [output dir] [MicroRTS map size] [--mask] [--seed int]
# 4x4 unmasked
python sb3/train_ppo.py zoo 4 --seed 42
python sb3/train_ppo.py zoo 4 --seed 43
python sb3/train_ppo.py zoo 4 --seed 44
# 4x4 masked
python sb3/train_ppo.py zoo 4 --mask --seed 42
python sb3/train_ppo.py zoo 4 --mask --seed 43
python sb3/train_ppo.py zoo 4 --mask --seed 44
# 10x10 unmasked
python sb3/train_ppo.py zoo 10 --seed 42
python sb3/train_ppo.py zoo 10 --seed 43
python sb3/train_ppo.py zoo 10 --seed 44
# 10x10 masked
python sb3/train_ppo.py zoo 10 --mask --seed 42
python sb3/train_ppo.py zoo 10 --mask --seed 43
python sb3/train_ppo.py zoo 10 --mask --seed 44
View the tensorboard log output:
# For 4x4 environment
tensorboard --logdir zoo/4x4/runs
# For 10x10 environment
tensorboard --logdir zoo/10x10/runs
Parameters
- class sb3_contrib.ppo_mask.MaskablePPO(policy, env, learning_rate=0.0003, n_steps=2048, batch_size=64, n_epochs=10, gamma=0.99, gae_lambda=0.95, clip_range=0.2, clip_range_vf=None, normalize_advantage=True, ent_coef=0.0, vf_coef=0.5, max_grad_norm=0.5, rollout_buffer_class=None, rollout_buffer_kwargs=None, target_kl=None, stats_window_size=100, tensorboard_log=None, policy_kwargs=None, verbose=0, seed=None, device='auto', _init_setup_model=True)[source]
Proximal Policy Optimization algorithm (PPO) (clip version) with Invalid Action Masking.
Based on the original Stable Baselines 3 implementation.
Introduction to PPO: https://spinningup.openai.com/en/latest/algorithms/ppo.html Background on Invalid Action Masking: https://arxiv.org/abs/2006.14171
- Parameters:
policy (MaskableActorCriticPolicy) – The policy model to use (MlpPolicy, CnnPolicy, …)
env (Env | VecEnv | str) – The environment to learn from (if registered in Gym, can be str)
learning_rate (float | Callable[[float], float]) – The learning rate, it can be a function of the current progress remaining (from 1 to 0)
n_steps (int) – The number of steps to run for each environment per update (i.e. batch size is n_steps * n_env where n_env is number of environment copies running in parallel)
batch_size (int | None) – Minibatch size
n_epochs (int) – Number of epoch when optimizing the surrogate loss
gamma (float) – Discount factor
gae_lambda (float) – Factor for trade-off of bias vs variance for Generalized Advantage Estimator
clip_range (float | Callable[[float], float]) – Clipping parameter, it can be a function of the current progress remaining (from 1 to 0).
clip_range_vf (None | float | Callable[[float], float]) – Clipping parameter for the value function, it can be a function of the current progress remaining (from 1 to 0). This is a parameter specific to the OpenAI implementation. If None is passed (default), no clipping will be done on the value function. IMPORTANT: this clipping depends on the reward scaling.
normalize_advantage (bool) – Whether to normalize or not the advantage
ent_coef (float) – Entropy coefficient for the loss calculation
vf_coef (float) – Value function coefficient for the loss calculation
max_grad_norm (float) – The maximum value for the gradient clipping
target_kl (float | None) – Limit the KL divergence between updates, because the clipping is not enough to prevent large update see issue #213 (cf https://github.com/hill-a/stable-baselines/issues/213) By default, there is no limit on the kl div.
stats_window_size (int) – Window size for the rollout logging, specifying the number of episodes to average the reported success rate, mean episode length, and mean reward over
tensorboard_log (str | None) – the log location for tensorboard (if None, no logging)
policy_kwargs (dict[str, Any] | None) – additional arguments to be passed to the policy on creation. See MaskablePPO Policies
verbose (int) – the verbosity level: 0 no output, 1 info, 2 debug
seed (int | None) – Seed for the pseudo random generators
device (device | str) – Device (cpu, cuda, …) on which the code should be run. Setting it to auto, the code will be run on the GPU if possible.
_init_setup_model (bool) – Whether or not to build the network at the creation of the instance
rollout_buffer_class (type[RolloutBuffer] | None)
rollout_buffer_kwargs (dict[str, Any] | None)
- collect_rollouts(env, callback, rollout_buffer, n_rollout_steps, use_masking=True)[source]
Collect experiences using the current policy and fill a
RolloutBuffer. The term rollout here refers to the model-free notion and should not be used with the concept of rollout used in model-based RL or planning.This method is largely identical to the implementation found in the parent class.
- Parameters:
env (VecEnv) – The training environment
callback (BaseCallback) – Callback that will be called at each step (and at the beginning and end of the rollout)
rollout_buffer (RolloutBuffer) – Buffer to fill with rollouts
n_steps – Number of experiences to collect per environment
use_masking (bool) – Whether or not to use invalid action masks during training
n_rollout_steps (int)
- Returns:
True if function returned with at least n_rollout_steps collected, False if callback terminated rollout prematurely.
- Return type:
bool
- dump_logs(iteration=0)
Write log.
- Parameters:
iteration (int) – Current logging iteration
- Return type:
None
- get_env()
Returns the current environment (can be None if not defined).
- Returns:
The current environment
- Return type:
VecEnv | None
- get_parameters()
Return the parameters of the agent. This includes parameters from different networks, e.g. critics (value functions) and policies (pi functions).
- Returns:
Mapping of from names of the objects to PyTorch state-dicts.
- Return type:
dict[str, dict]
- get_vec_normalize_env()
Return the
VecNormalizewrapper of the training env if it exists.- Returns:
The
VecNormalizeenv.- Return type:
VecNormalize | None
- learn(total_timesteps, callback=None, log_interval=1, tb_log_name='MaskablePPO', reset_num_timesteps=True, use_masking=True, progress_bar=False)[source]
Return a trained model.
- Parameters:
total_timesteps (int) – The total number of samples (env steps) to train on Note: it is a lower bound, see issue #1150
callback (None | Callable | list[BaseCallback] | BaseCallback) – callback(s) called at every step with state of the algorithm.
log_interval (int) – for on-policy algos (e.g., PPO, A2C, …) this is the number of training iterations (i.e., log_interval * n_steps * n_envs timesteps) before logging; for off-policy algos (e.g., TD3, SAC, …) this is the number of episodes before logging.
tb_log_name (str) – the name of the run for TensorBoard logging
reset_num_timesteps (bool) – whether or not to reset the current timestep number (used in logging)
progress_bar (bool) – Display a progress bar using tqdm and rich.
self (SelfMaskablePPO)
use_masking (bool)
- Returns:
the trained model
- Return type:
SelfMaskablePPO
- classmethod load(path, env=None, device='auto', custom_objects=None, print_system_info=False, force_reset=True, **kwargs)
Load the model from a zip-file. Warning:
loadre-creates the model from scratch, it does not update it in-place! For an in-place load useset_parametersinstead.- Parameters:
path (str | Path | BufferedIOBase) – path to the file (or a file-like) where to load the agent from
env (Env | VecEnv | None) – the new environment to run the loaded model on (can be None if you only need prediction from a trained model) has priority over any saved environment
device (device | str) – Device on which the code should run.
custom_objects (dict[str, Any] | None) – Dictionary of objects to replace upon loading. If a variable is present in this dictionary as a key, it will not be deserialized and the corresponding item will be used instead. Similar to custom_objects in
keras.models.load_model. Useful when you have an object in file that can not be deserialized.print_system_info (bool) – Whether to print system info from the saved model and the current system info (useful to debug loading issues)
force_reset (bool) – Force call to
reset()before training to avoid unexpected behavior. See https://github.com/DLR-RM/stable-baselines3/issues/597kwargs – extra arguments to change the model when loading
- Returns:
new model instance with loaded parameters
- Return type:
SelfBaseAlgorithm
- property logger: Logger
Getter for the logger object.
- predict(observation, state=None, episode_start=None, deterministic=False, action_masks=None)[source]
Get the policy action from an observation (and optional hidden state). Includes sugar-coating to handle different observations (e.g. normalizing images).
- Parameters:
observation (ndarray | dict[str, ndarray]) – the input observation
state (tuple[ndarray, ...] | None) – The last hidden states (can be None, used in recurrent policies)
episode_start (ndarray | None) – The last masks (can be None, used in recurrent policies) this correspond to beginning of episodes, where the hidden states of the RNN must be reset.
deterministic (bool) – Whether or not to return deterministic actions.
action_masks (ndarray | None)
- Returns:
the model’s action and the next hidden state (used in recurrent policies)
- Return type:
tuple[ndarray, tuple[ndarray, …] | None]
- save(path, exclude=None, include=None)
Save all the attributes of the object and the model parameters in a zip-file.
- Parameters:
path (str | Path | BufferedIOBase) – path to the file where the rl agent should be saved
exclude (Iterable[str] | None) – name of parameters that should be excluded in addition to the default ones
include (Iterable[str] | None) – name of parameters that might be excluded but should be included anyway
- Return type:
None
- set_env(env, force_reset=True)
Checks the validity of the environment, and if it is coherent, set it as the current environment. Furthermore wrap any non vectorized env into a vectorized checked parameters: - observation_space - action_space
- Parameters:
env (Env | VecEnv) – The environment for learning a policy
force_reset (bool) – Force call to
reset()before training to avoid unexpected behavior. See issue https://github.com/DLR-RM/stable-baselines3/issues/597
- Return type:
None
- set_logger(logger)
Setter for for logger object.
Warning
When passing a custom logger object, this will overwrite
tensorboard_logandverbosesettings passed to the constructor.- Parameters:
logger (Logger)
- Return type:
None
- set_parameters(load_path_or_dict, exact_match=True, device='auto')
Load parameters from a given zip-file or a nested dictionary containing parameters for different modules (see
get_parameters).- Parameters:
load_path_or_iter – Location of the saved data (path or file-like, see
save), or a nested dictionary containing nn.Module parameters used by the policy. The dictionary maps object names to a state-dictionary returned bytorch.nn.Module.state_dict().exact_match (bool) – If True, the given parameters should include parameters for each module and each of their parameters, otherwise raises an Exception. If set to False, this can be used to update only specific parameters.
device (device | str) – Device on which the code should run.
load_path_or_dict (str | dict[str, Tensor])
- Return type:
None
- set_random_seed(seed=None)
Set the seed of the pseudo-random generators (python, numpy, pytorch, gym, action_space)
- Parameters:
seed (int | None)
- Return type:
None
MaskablePPO Policies
- sb3_contrib.ppo_mask.MlpPolicy
alias of
MaskableActorCriticPolicy
- class sb3_contrib.common.maskable.policies.MaskableActorCriticPolicy(observation_space, action_space, lr_schedule, net_arch=None, activation_fn=<class 'torch.nn.modules.activation.Tanh'>, ortho_init=True, features_extractor_class=<class 'stable_baselines3.common.torch_layers.FlattenExtractor'>, features_extractor_kwargs=None, share_features_extractor=True, normalize_images=True, optimizer_class=<class 'torch.optim.adam.Adam'>, optimizer_kwargs=None)[source]
Policy class for actor-critic algorithms (has both policy and value prediction). Used by A2C, PPO and the likes.
- Parameters:
observation_space (Space) – Observation space
action_space (Space) – Action space
lr_schedule (Callable[[float], float]) – Learning rate schedule (could be constant)
net_arch (list[int] | dict[str, list[int]] | None) – The specification of the policy and value networks.
activation_fn (type[Module]) – Activation function
ortho_init (bool) – Whether to use or not orthogonal initialization
features_extractor_class (type[BaseFeaturesExtractor]) – Features extractor to use.
features_extractor_kwargs (dict[str, Any] | None) – Keyword arguments to pass to the features extractor.
share_features_extractor (bool) – If True, the features extractor is shared between the policy and value networks.
normalize_images (bool) – Whether to normalize images or not, dividing by 255.0 (True by default)
optimizer_class (type[Optimizer]) – The optimizer to use,
th.optim.Adamby defaultoptimizer_kwargs (dict[str, Any] | None) – Additional keyword arguments, excluding the learning rate, to pass to the optimizer
- evaluate_actions(obs, actions, action_masks=None)[source]
Evaluate actions according to the current policy, given the observations.
- Parameters:
obs (Tensor) – Observation
actions (Tensor) – Actions
action_masks (Tensor | None)
- Returns:
estimated value, log likelihood of taking those actions and entropy of the action distribution.
- Return type:
tuple[Tensor, Tensor, Tensor | None]
- extract_features(obs, features_extractor=None)[source]
Preprocess the observation if needed and extract features.
- Parameters:
obs (Tensor | dict[str, Tensor]) – Observation
features_extractor (BaseFeaturesExtractor | None) – The features extractor to use. If None, then
self.features_extractoris used.
- Returns:
The extracted features. If features extractor is not shared, returns a tuple with the features for the actor and the features for the critic.
- Return type:
Tensor | tuple[Tensor, Tensor]
- forward(obs, deterministic=False, action_masks=None)[source]
Forward pass in all the networks (actor and critic)
- Parameters:
obs (Tensor) – Observation
deterministic (bool) – Whether to sample or use deterministic actions
action_masks (ndarray | None) – Action masks to apply to the action distribution
- Returns:
action, value and log probability of the action
- Return type:
tuple[Tensor, Tensor, Tensor]
- get_distribution(obs, action_masks=None)[source]
Get the current policy distribution given the observations.
- Parameters:
obs (Tensor | dict[str, Tensor]) – Observation
action_masks (ndarray | None) – Actions’ mask
- Returns:
the action distribution.
- Return type:
MaskableDistribution
- predict(observation, state=None, episode_start=None, deterministic=False, action_masks=None)[source]
Get the policy action from an observation (and optional hidden state). Includes sugar-coating to handle different observations (e.g. normalizing images).
- Parameters:
observation (ndarray | dict[str, ndarray]) – the input observation
state (tuple[ndarray, ...] | None) – The last states (can be None, used in recurrent policies)
episode_start (ndarray | None) – The last masks (can be None, used in recurrent policies)
deterministic (bool) – Whether or not to return deterministic actions.
action_masks (ndarray | None) – Action masks to apply to the action distribution
- Returns:
the model’s action and the next state (used in recurrent policies)
- Return type:
tuple[ndarray, tuple[ndarray, …] | None]
- predict_values(obs)[source]
Get the estimated values according to the current policy given the observations.
- Parameters:
obs (Tensor | dict[str, Tensor]) – Observation
- Returns:
the estimated values.
- Return type:
Tensor
- sb3_contrib.ppo_mask.CnnPolicy
alias of
MaskableActorCriticCnnPolicy
- class sb3_contrib.common.maskable.policies.MaskableActorCriticCnnPolicy(observation_space, action_space, lr_schedule, net_arch=None, activation_fn=<class 'torch.nn.modules.activation.Tanh'>, ortho_init=True, features_extractor_class=<class 'stable_baselines3.common.torch_layers.NatureCNN'>, features_extractor_kwargs=None, share_features_extractor=True, normalize_images=True, optimizer_class=<class 'torch.optim.adam.Adam'>, optimizer_kwargs=None)[source]
CNN policy class for actor-critic algorithms (has both policy and value prediction). Used by A2C, PPO and the likes.
- Parameters:
observation_space (Space) – Observation space
action_space (Space) – Action space
lr_schedule (Callable[[float], float]) – Learning rate schedule (could be constant)
net_arch (list[int] | dict[str, list[int]] | None) – The specification of the policy and value networks.
activation_fn (type[Module]) – Activation function
ortho_init (bool) – Whether to use or not orthogonal initialization
features_extractor_class (type[BaseFeaturesExtractor]) – Features extractor to use.
features_extractor_kwargs (dict[str, Any] | None) – Keyword arguments to pass to the features extractor.
share_features_extractor (bool) – If True, the features extractor is shared between the policy and value networks.
normalize_images (bool) – Whether to normalize images or not, dividing by 255.0 (True by default)
optimizer_class (type[Optimizer]) – The optimizer to use,
th.optim.Adamby defaultoptimizer_kwargs (dict[str, Any] | None) – Additional keyword arguments, excluding the learning rate, to pass to the optimizer
- sb3_contrib.ppo_mask.MultiInputPolicy
alias of
MaskableMultiInputActorCriticPolicy
- class sb3_contrib.common.maskable.policies.MaskableMultiInputActorCriticPolicy(observation_space, action_space, lr_schedule, net_arch=None, activation_fn=<class 'torch.nn.modules.activation.Tanh'>, ortho_init=True, features_extractor_class=<class 'stable_baselines3.common.torch_layers.CombinedExtractor'>, features_extractor_kwargs=None, share_features_extractor=True, normalize_images=True, optimizer_class=<class 'torch.optim.adam.Adam'>, optimizer_kwargs=None)[source]
MultiInputActorClass policy class for actor-critic algorithms (has both policy and value prediction). Used by A2C, PPO and the likes.
- Parameters:
observation_space (Dict) – Observation space (Tuple)
action_space (Space) – Action space
lr_schedule (Callable[[float], float]) – Learning rate schedule (could be constant)
net_arch (list[int] | dict[str, list[int]] | None) – The specification of the policy and value networks.
activation_fn (type[Module]) – Activation function
ortho_init (bool) – Whether to use or not orthogonal initialization
features_extractor_class (type[BaseFeaturesExtractor]) – Uses the CombinedExtractor
features_extractor_kwargs (dict[str, Any] | None) – Keyword arguments to pass to the feature extractor.
share_features_extractor (bool) – If True, the features extractor is shared between the policy and value networks.
normalize_images (bool) – Whether to normalize images or not, dividing by 255.0 (True by default)
optimizer_class (type[Optimizer]) – The optimizer to use,
th.optim.Adamby defaultoptimizer_kwargs (dict[str, Any] | None) – Additional keyword arguments, excluding the learning rate, to pass to the optimizer